Sú pokročilí roboti v podobe ozajstných androidov už za dverami, alebo ide stále len o nereálne očakávania a vzdialené sny, tak ako tomu bolo už pred troma dekádami? V akom stave je vývoj autonómnych robotov dnes a ako na tom bude v nasledujúcich dekádach?
Robot, voľne sa pohybujúci na svojich dvoch či štyroch nohách, ktorý vykonáva najrôznejšie pokročilé úlohy a pripomína svojím správaním a schopnosťami zviera, či dokonca človeka, je odvekým snom vedy a techniky. Masívny pokrok, ktorý sa v tejto oblasti udial od začiatku tohto storočia, nás napĺňa veľkým optimizmom.
Nie je však možné s istotou predpovedať, ako rýchlo bude tempo vývoja robotických systémov pokračovať v nasledujúcich rokoch a či nás dovedie do cieľa v relatívne dohľadnej dobe. Nevieme totiž, ako dlho nám bude trvať uspokojivo vyriešiť problémy, ktorým v tomto odvetví dnes čelíme, pretože ich rozsah a skutočnú povahu často nepoznáme. Je však takmer isté, že robotika sa v nasledujúcich dekádach podpíše na masívnych zmenách v našej spoločnosti.
Prvotným zásahom tejto premeny bude masívna transformácia výroby do podoby automatických robotických ramien a iných pokročilých industriálnych robotov. Aj keď vo svojej podstate nejde o novinku a napríklad v automobilovej výrobe sa robotické ramená používajú už celé dekády, nemožno zavierať oči pred obrovskou zmenou, ktorá nastala v posledných rokoch.
Touto zmenou je to, že zatiaľ čo ešte v roku 2008 bola priemerná návratnosť nákupu takýchto automatických liniek 12 rokov, v súčasnosti sa vďaka pokroku v technológiách, objeme výroby a nárastu miezd robotníkov pohybuje v mnohých oblastiach na úrovni 1 až 2 rokov. Tento fakt naštartoval masívny prerod vo výrobe, ktorý dnes bežná verejnosť ešte príliš nevníma, avšak už onedlho ho pocíti v úplnej sile. Podrobnejšie sme sa tejto problematike venovali v článku Vyrobené v Číne bez Číňanov.
Túto industriálnu automatickú robotiku však netreba zamieňať s autonómiou. Aj keď pokročilé robotické ramená vo výrobe či skladoch celkom určite výrazne ovplyvnia spoločnosť z hľadiska efektivity výroby a takisto pracovného trhu, autonómna robotika, v podobe strojov, ktoré sa budú pohybovať medzi nami, je predsa len z celkom iného súdka. Aj keď do tejto oblasti patria bezpochyby napríklad aj pokročilé samoriadiace vozidlá, v tomto článku sa budeme venovať predovšetkým tým mechanizmom, ktoré z hľadiska pohybu a interakcie fungujú podobne ako živé organizmy.
SAMOSTATNE POHYBUJÚCI SA ROBOT – SNY, TÚŽBY A REALITA
Predstava, že pokročilí androidi budú našimi spoločníkmi, pričom sa budú správať viac-menej podobne ako ľudia, trvá už viac ako storočie. Je to vidieť napríklad aj na ich bohatej prítomnosti v kinematografii, pričom skutočný filmový ošiaľ nastal v tejto oblasti v 80. rokoch minulého storočia, kedy sa objavili kultové filmy ako Terminátor (1984), Blade Runner (1982) či RoboCop (1987). Dôležitým rozdielom tejto dekády bolo, že sa neobjavovali výhradne len snímky zobrazujúce robotické bytosti budúcnosti, ale aj také, ktoré ukazovali pokročilú robotiku v prítomnosti, ako keby bola už doslova za rohom.
Medzi tieto typy snímok patrili napríklad filmy D.A.R.Y.L. (1985) či Short Circuit (1986), ktorý je u nás známy pod názvom Číslo 5 žije. Aj keď je v kinematografii pokročilá robotika prakticky odjakživa spájaná s umelou inteligenciou (dobrým príkladom z poslednej doby je napríklad Ex Machina), v samotnom odbore ako takom tomu tak dlhé dekády nebolo a ani dnes tomu tak vo väčšine prípadov nie je.
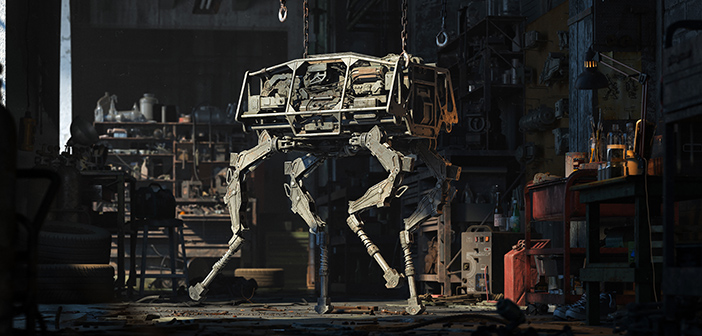
Robotický kôň LR3 od Boston Dynamics
Prvé generácie robotov, z ktorých dnes priamo vychádzajú industriálne robotické ramená, to skrátka nepotrebovali. Stroje tohto typu sú obvykle pripevnené na statickú základňu, pričom ich úlohou je vykonávať veľmi rýchlo a presne opakujúcu sa činnosť. Ich prednosťou je vysoká rýchlosť, precíznosť a neúnavnosť, pričom v základe na to potrebujú relatívne štandardný softvér. Robot tohto typu obvykle nemusí riešiť nejaké príliš komplexné bezpečnostné situácie (okrem neprítomnosti či záseku materiálu), pretože výrazne premenlivé činitele, ako napríklad priama prítomnosť ľudí, sa ho zvyčajne nijako netýka.
Je celkom jasné, že na softvér robotov, ktorí sa pohybujú napríklad v premávke či dokonca medzi ľuďmi, napríklad v budovách, sa kladú celkom iné požiadavky. V takýchto prípadoch sa rýchlo ukáže, že základná súprava úloh a reakcií, na ktoré by bolo robota nutné „na tvrdo“ naprogramovať, rastie do nekonečného zástupu možností a stáva sa tak niečím nemožným. Je tak nevyhnutné integrovať aspoň základný systém umelej inteligencie, ktorý bude celkom nové situácie schopný vyhodnocovať a správne na ne reagovať na základe svojich naprogramovaných, alebo naučených poznatkov.
Súčasná situácia v tomto odbore je od tej z konca minulého storočia masívne vzdialená práve vďaka pokrokom v strojovom učení (a dnes hlavne v hlbokom učení) a iných prvkoch umelej inteligencie, ktoré sa v priebehu 21. storočia stali prakticky neoddeliteľnou súčasťou pokročilej robotiky. Tento smer je pritom vidieť už pri robotických ramenách, ktoré sa z prakticky slepej cyklickej činnosti môžu posúvať k rozpoznávaniu objektov a variabilnejšej činnosti, ako napríklad triedeniu rôznych druhov odpadu na páse či napríklad ku chirurgickým zákrokom, kde už sa robot nielenže pohybuje v blízkosti ľudí, ale doslova aj v nich.
Aktuálny robotický „pes“ Spot Mini od Boston Dynamics
To všetko umožnil obrovský zlom v pokroku konvolučných (spletitých) a rekurentných (zvratných) neurónových sietí, ktorý sa udial na začiatku tejto dekády a v nasledujúcich rokoch umožnil masívne zlepšenie optického rozpoznávania objektov, zvuku, pokročilého prekladu a mnohých ďalších prvkov, ktoré vidíme dnes v praxi v mnohých produktoch (napr. hlasoví asistenti, vyhľadávanie, automatické katalogizovanie, prekladače).
Pokročilé metódy strojového a predovšetkým hlbokého učenia viedli v posledných desiatich rokoch k veľkému pokroku takisto v autonómnej robotike, pričom pomohli urobiť obrovský skok v strojovom videní. Jedným z paradoxov robotiky (a takisto umelej inteligencie), ktorý sa rýchlo ukázal v úplnom počiatku vývoja je to, že mnoho činností, ktoré považujeme za ťažké, sú pre stroje mimoriadne jednoduché (napr. komplexné matematické výpočty, blesková reakčná doba), zatiaľ čo tie, ktoré považujeme za triviálne a zvládne ich aj dieťa či pes (napr. rozpoznať stoličku od gauča, či dvere od steny) sú pre stroje mimoriadne náročné.
V súvislosti s robotikou je tento fakt dobre badateľný aj na štvornohej a ešte viac dvojnohej chôdzi, ktorá je na udržanie rovnováhy a neustálu korekciu motorických funkcií nesmierne náročná. Človek si toho nie je obvykle vôbec vedomý, pretože všetky tieto činnosti, či už udržanie rovnováhy ale rozpoznanie objektov okolo, sa dejú automaticky mimo nášho vedomého úsilia (vďaka evolučne vycibreným biologickým „obvodom“). Považovali sme ich tak mylne za triviálne, a to až do doby, než sme sa ich pokúsili replikovať.
K mnohým problémom v robotike je možné pristupovať z troch základných uhlov, pričom to, že niektoré sú najúčinnejšie v jednej oblasti automaticky neznamená, že budú aj v druhej. Prístupy sa pri tom od seba odlišujú z hľadiska dátovej efektívnosti a stupňa automatizácie. Na jednej strane spektra je ľudská optimalizácia, pri ktorej sa konkrétne parametre a správanie zadávajú na základe skúseností a schopností vývojárov, ktorí sa snažia o čo najlepší výsledok. Tým je obvykle mechanizmus, ktorý je efektívny, avšak čím je úloha náročnejšia, tým je náročnejšie aj jej dostatočné vyriešenie, pričom pri tých komplexných už riešenie ani časovo či zdrojovo nie je možné.
O niečo lepšie je na tom prístup k optimalizácii na základe modelov. Dátová efektivita je už značne menšia, pretože sa využívajú modely, ktoré už nie sú najvhodnejšie za každej situácie, ale len vo väčšine, pričom umožňujú nárast automatizácie. Vhodné modely však stále musia vývojári nájsť a aplikovať. Najväčšiu automatizáciu ponúka tretí prístup v podobe tzv. bezparametrickej optimalizácie, kam patrí pokročilé strojové učenie a takisto hlboké neurónové siete.
Nevýhodou tohto prístupu však je, že na tréning je potrebné masívne množstvo dát. Podstatný rozdiel je takisto to, že zatiaľ čo pri ľudskej optimalizácii je vývojárom dobre známe, ako vlastne systém funguje (a môžu ho teda cielene vylepšovať a upravovať), v prípade neurónových sietí, ktoré riešenie problému nájdu sami, sa už celý mechanizmus zahaľuje do hmly a vývojári často nemajú tušenia, prečo konkrétny mechanizmus reaguje tak ako reaguje, čo konkrétne ho robí interne lepším (mimo hotového výsledku, ktorý vidíme), kde sú jeho slabiny a v prípade že sa slabiny odhalia, ako s nimi bojovať.
ROBOT, KTORÝ CHODÍ TAK DOBRE AKO ČLOVEK ČI ZVIERA
Kým vo vizuálnom vneme a rozpoznávaní okolia hrajú neurónové siete čoraz výraznejšiu rolu, v prípade pohybu dnes stále dominuje klasický prístup z hľadiska modelov a monitorovaného a navádzaného učenia. Dôvody sú rôzne. Základom je, že nie je potrebné také množstvo dát, pričom ich získanie (mimo virtuálneho prostredia) je často problematické, v prípade, že nechceme robota neustále výrazne poškodzovať. Na ich získanie je potrebný takisto dostatok času a prostriedkov. Do hry vstupuje aj to, že malé pochopenie, prečo neurónová sieť funguje tak ako funguje, môže pokrok naopak skôr spomaliť než zrýchliť a v neposlednom rade je na mieste aj bezpečnosť.
Pri každom robotovi, ktorý bude operovať v blízkosti ľudí, je dôležité sa pýtať, čo bolo urobené pre bezpečnosť toho, aby pohybom robota nedošlo k zraneniu osôb v okolí. Odpoveď „ja vlastne celkom neviem, ako systém pohybu funguje“ nie je príliš presvedčivá. Na druhú stranu ale treba povedať, že ak je systém podrobne testovaný a vykazuje dobrú a bezpečnú prevádzku, nie je dôvod, aby sme ho za bezpečný nepovažovali. Koniec koncov, tak sa správame aj k ľudom, pričom ani pri nich nikto nedokáže so stopercentnou istotou povedať, že keď mesiace či roky nevykazovali žiadne „negatívne vlastnosti“, bude tomu tak aj zajtra.
Spot Mini používa chrbtové rameno na uchopenie predmetov
Ak chceme dnes vidieť, v akom stave je špičková robotika z hľadiska pohybu štvornohou či dvojnohou chôdzou, niet lepšej demonštrácie, než videá spoločnosti Boston Dynamics. Ako s úsmevom zažartoval Emo Todorov, expert na biomechaniku, pohybové algoritmy a strojové učenie Washingtonskej univerzity: „Kvôli týmto chlapcom my ostatní vyzeráme ako banda neschopných akademikov strúhajúcich ceruzky.“
Boston Dynamics je už viac ako štvrťstoročie starou firmou, ktorú v roku 1992 založil Marc Raibert, bývalý profesor univerzity Carnegie Mellon a neskôr MIT. Ten od roku 1980 viedol univerzitné robotické laboratórium Leg Lab, kde okrem iného vytvoril napríklad prvého pokročilého skákajúceho jednonohého robota. Napokon sa však so svojím výskumom akademický svet rozhodol opustiť a svoju prácu sústredil do komerčnej spoločnosti a vývojárskeho laboratória, ktorého výsledky vidíme dnes. Ultimátnym cieľom firmy je vytvorenie štvornohých a dvojnohých strojov s nadľudskými pohybovými a koordinačnými schopnosťami, čo by robotike otvorilo dvere do obrovského rozsahu použití.
Nie je tajomstvom, že vývoj robotov Boston Dynamics bol hlavne v úvodných rokoch existencie firmy bohato živený finančnými grantmi od agentúry DARPA. Ide o veľmi vplyvnú a v mnohých ohľadoch veľmi špecifickú inštitúciu pre pokročilý výskum obranných projektov amerického ministerstva obrany, pričom jej hlavnou úlohou je zabránenie tomu, aby nečakaný pokrok v technológiách nejakým spôsobom USA zaskočil a znížil bojaschopnosť americkej armády. Agentúra to vykonáva tak, že neprestajne preskúmava a financuje všetky aspekty raných a objavujúcich sa technológií, v snahe včas zachytiť ich vojenský potenciál, čím môže ako prvá vytvoriť revolúciu v rámci ozbrojených síl. Týmto spôsobom tak má agentúra zachovať neprestajnú technologickú dominanciu USA nad zvyškom sveta.
V prípade Boston Dynamics šlo o projekty, ktoré svet spoznal pred desiatimi rokmi pod názvami BigDog a takisto LS3. V základe sa projekt zaoberal uskutočniteľnosťou robotického nosiča na sprevádzanie vojenských hliadok či misií. V prvom prípade šlo o robotického psa, ktorý pri výške 1 m a váhe 109 kg uniesol 45 kg, v tom druhom o robotického koňa s výškou 1,7 m, váhou 590 kg a nosnosťou 181 kg. Na videách môžeme vidieť tieto stroje kráčať lesom do ostrého kopca, brodiť sa vysokým snehom či pohybovať sa na sutinách a v bahne.
Demonštrácia veľkej stability strojov je na videách vykonávaná kopaním a sácaním od ľudí okolo, ktorí sa robotov snažia obvykle neúspešne zhodiť. Roboty boli poháňané buď benzínovým motorom (BigDog) alebo kombináciou plynového a dieselového motora (LS3), čo umožňovalo výdrž 24 hodín pri dosahu 32 km. V spolupráci so svojimi gyroskopmi, lidarom a stereo kamerami mohli byť potenciálne použité na nesenie zásob, munície či výzbroje a sprevádzať napríklad vojakov v teréne nepriechodnom pre vozidlá. Komplikácie však mohol spôsobovať pomerne veľký hluk, pripomínajúci vysoký rev motorovej píly (BigDog), alebo dieselové čerpadlo či generátor (LS3).
Firma takisto neskôr testovala variant nazvaný WildCat (výška 1,17 m, váha 156 kg), ktorý bol okrem chôdze schopný bežať rýchlosťou 32 km/h, pričom k tomu využíval metanolový motor, hlukom pripomínajúci terénnu motorku. Šlo každopádne o technologické vývojové demonštrátory a žiadny z týchto robotov neskočil v reálnom nasadení. Koniec koncov, aj keď pohyb a stabilita strojov bola vrcholová a dovtedy nevídaná, stále sa z hľadiska efektivity a autonómie nevyrovnali napríklad živému koňovi. Nič sa však nerodí cez noc a pokrok, ktorý tieto roboty svetu ukázali, bol vskutku masívny. Všetko to však vybledlo pri pohľade na to, čo sa odohralo za posledných päť rokov.
V roku 2013 bol Boston Dynamics odkúpený firmou Google, ktorá vlastnila už niekoľko iných robotických divízií, pričom v roku 2015 sa po reštrukturalizácii firma dostala pod krídla materského Alfabetu, ako samostatná dcérska spoločnosť, kde vydržala až do roku 2017. Google napokon dal od tohto druhu vývoja ruky preč a v minulom roku Boston Dynamics prešiel za nezverejnenú sumu do vlastníctva japonského technologického konglomerátu SoftBank.
Za tieto roky sme mohli v demonštračných videách vidieť skutočné zázraky. V roku 2015 firma ukázala robotického psa Spot, ktorý sa pri svojej výške 0,94 m a váhe 75 kg pohyboval bez problémov v kancelárskom prostredí, či v bežných budovách. Jeho súčasťou bol otočný 360° lidar, pričom motor bol kompletne elektrický, čo zaručovalo značne tichší chod ako mali predchádzajúce spaľovacie verzie (na batériu zvládol fungovať 45 minút). Oprávnený rozruch spôsobila novšia a menšia verzia tohto stroja, nazvaná Spot Mini, ktorú sme po prvýkrát mohli vidieť v roku 2016.
Pôvodná verzia SpotMini pohybujúca sa v interiéry
S výškou 0,84 m a váhou 25 kg ide o vskutku obratný stroj, ktorý vo videu vidíme operovať v rámci demonštračného domu s nábytkom a takisto prítomnými ľuďmi. Robot prechádza bez problémov miestnosťami a úzkymi priestormi, obchádza prekážky alebo sa im prispôsobuje, pričom vidíme napríklad to, ako sa pri chôdzi skrčí a podlieza pod stolom, ktorý je nižší než on. Robot bez problémov takisto rýchlo vybieha schodišťom, pričom podľa zverejnených údajov mu batéria vydrží 90 minút.
Zaujímavým rozdielom oproti predošlej verzii je to, že na chrbte môže mať osadené robotické rameno (5 kg), ktoré môže používať na manipuláciu s predmetmi. Vo videu ho vidíme napríklad vziať pohár z kuchynského drezu, ktorý vkladá do umývačky riadu a takisto to, ako uchopuje prázdnu plechovku a hádže ju do odpadkového koša.
Veľmi zaujímavé je to, keď sa robot ako v animovaných rozprávkach pošmykne pri rýchlej chôdzi na banánovej šupke a vyvalí hore „bruchom“, pričom rameno použije na to, aby sa zdvihol späť na svoje nohy. V najnovšej dvojici videí, ktoré boli zverejnené vo februári tohto roku, vidíme nový, ladnejšie vyzerajúci variant tohto robota otvárať dvere kľučkou a pohodlne nimi prechádzať, a to aj napriek tomu, že sa mu ľudia v tom snažia zabrániť neustálym zatváraním a dokonca aj ťahaním za „chvost“.
Prechádzanie dverami aj napriek odporu
Je zaujímavé, ako v komentároch mnohí ľudia prirodzene vyjadrili ľútosť nad negatívnym správaním k robotovi, ktorý sa len roztomilo snažil prejsť, i keď pravdaže šlo len o antropomorfizáciu a robot žiadnu bolesť ani frustráciu necítil.
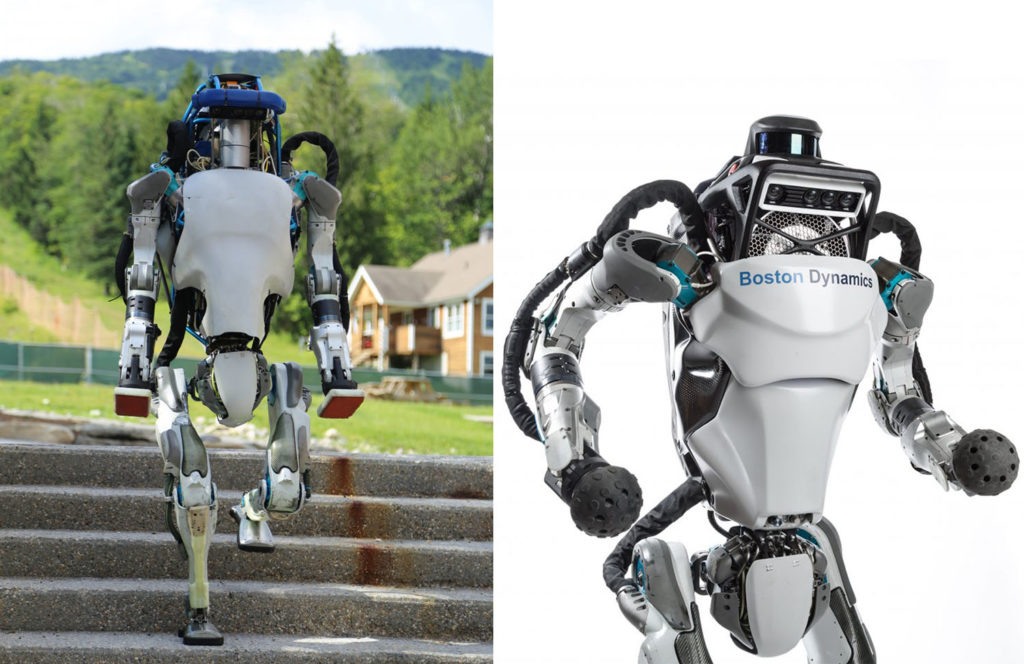
Ešte väčšie reakcie v tomto smere spôsobil robot Atlas, ktorý má podobu ľudskej postavy a pohybuje sa teda na dvoch nohách. Atlas bol vyvinutý na základe staršieho robota Boston Dynamics na testovanie dvojnohej chôdze, nazvaného PETMAN. Pozornosť začal Atlas pútať hlavne vo svojej „ľudskejšej“ a vzhľadnejšej druhej verzii, ktorá bola vo videu prezentovaná po prvýkrát v roku 2016.
V tejto verzii vidíme robota vychádzať dverami budovy Boston Dynamics, pričom si otvára a následne pokračuje chôdzou zasneženým lesom plným nerovného terénu a trsov vegetácie, zaplietajúcej sa mu pod nohy. Častokrát sa mu pri tom cestou dole kopcom noha pošmykne na šmykľavom povrchu, presne tak ako človeku, pričom nemá žiadny problém udržať rovnováhu.
Takej rýchlej a stabilnej robotickej dvojnohej chôdze po nerovnom teréne sme boli svedkami po prvýkrát v histórií a robot tak zaslúžene vyvolal veľkú pozornosť zo strany médií a uznanie od expertov z odboru.
Chôdza Atlasa a manipulácia s objektmi
V zvyšku videa ho môžeme vidieť brať 4,5 kg škatule zo zeme a ukladať ich do políc, pričom najväčšiu fascináciu verejnosti spustili nasledujúce scény, pri ktorých robot dvíha krabice, pričom mu to neprestajne sťažuje človek s hokejkou v ruke. Ten krabice pred robotom na poslednú chvíľu posúva, alebo mu ich vyráža z ruky a v jednom momente do robota pichá a zhadzuje ho na zem. Atlas sa však bez problémov svojpomocne postaví bez pomoci a demonštratívne odchádza dverami.
V súčasnosti sa Atlas pri presúvaní škatúľ napríklad na podávacom páse dostáva zhruba na 2/3 rýchlosti človeka. To je pravdaže omnoho pomalšie, než to dokáže industriálne robotické rameno, avšak Atlas sa pohybuje tak ako človek a môže pracovať v dynamickom prostredí. Jeho stabilita a automatický balans je pritom čoraz fascinujúcejšia. Tretia a aktuálna verzia robota bola vo videu prvýkrát predstavená v novembri minulého roku.
Robot sa mierne zmenšil (z 1,75 m na 1,5 m) a takisto ubral na váhe (z 82 kg na 75 kg). Viditeľne prepracovaná bola takisto oblasť „hlavy“ s lidarom a stereo kamerami, ktoré pôsobia kompaktnejšie. Demonštračné video posunulo to, čo od dvojnohých robotov očakávame. Nového Atlasa môžeme vidieť agilne skákať cez prekážky, otáčať sa v skoku o 180° a na neuveriteľné prekvapenie všetkých aj vystrihnúť spätné salto.
Atlas skáče salto
NEREÁLNE PREDSTAVY VYTVORENÉ MARKETINGOM A NAŠIMI POCITMI
Pokrok, ktorý je na najnovších robotoch Boston Dynamics vidieť, je vskutku dych berúci, ale treba povedať, že pre laika je celá situácia skrytá veľmi často za umelú pozlátku a nepochopenie. Mnoho ľudí si neuvedomuje, že videá na YouTube, zverejňované touto spoločnosťou, sú propagačný a reklamný materiál. V skutočnosti nemáme ani poňatia, či roboti fungujú takto dobre napríklad v 80 % prípadov, alebo len v 10 % prípadov. Boston Dynamics je uzavretá komerčná spoločnosť a výsledky svojho vývoja neprezentuje v žiadnych vedeckých prácach. Nikto teda okrem nich presne nevie, aké metódy sú používané a akú majú úspešnosť a chybovosť.
Vľavo druhá a vpravo aktuálna tretia verzia robota Atlas
V prvom rade, mnoho ľudí si neuvedomuje, že roboti sú vo väčšine prípadov riadení. V ich blízkosti, často mimo záberu kamery, je človek s ovládacou konzolou zavesenou okolo krku a joystickom, ktorým robota riadi ako herné autíčko na ovládanie. Toto je pravdaže ľudom z odboru známe a ak sa zúčastníte živej demonštrácie týchto strojov, alebo si napríklad pozriete krátku prednášku a demonštráciu Marca Raiberta, riaditeľa spoločnosti, na konferencii TED, tento fakt sa vždy oznámi bez tajností.
Zázrakom Boston Dynamics je totiž demonštrácia schopností chôdze, pohyblivosti a stability, ktorá nemá v robotickom svete obdobu. Aj keď je robot obvykle riadený, je to len z hľadiska smeru. Plánovanie krokov a vyvažovanie vykonáva sám.
Roboti majú aj autonómny režim, pri ktorom sa pohybujú podľa okolia, mapového podkladu, GPS, či naplánovanej trasy samostatne, pričom zvládnu rozpoznávať objekty a manipulovať s nimi v základnej podobe (ak sa na to vopred naprogramujú). Ak ale vo videu vidíte veľmi agilnú chôdzu v blízkosti osôb, či delikátnejšiu manipuláciu, ako napríklad podávanie predmetov živým osobám, v drvivej väčšine prípadov bude stroj riadený obsluhou.
Hej kámo, podáš mi pomocnú ruku?
Úspech Boston Dynamics treba po správnosti vnímať z hľadiska mobility. Ide napríklad o rýchly beh, chôdzu v každom teréne či po schodoch, otváranie dverí, skákanie, zdvihnutie samého seba po páde a podobne. Ak vás videá Boston Dynamics fascinujú z hľadiska správania robotov, ktorí v mnohom pripomínajú živé bytosti, ide žiaľ len o klamný dojem. Typickým príkladom je nedávne video, pri ktorom dva roboty Spot Mini, jeden bez ramena a druhý s ramenom, prechádzajú dverami.
Reálnym zázrakom celej demonštrácie je to, ako robot úspešne používa predprogramovaný mechanizmus na otvorenie kľučkou, pričom úspešné bojuje s disrupciami. Osoba vedľa neho totiž na dvere vyvíja náhodný tlak a pokúša sa ich zatvárať, brániac tak robotovi v priechode. Robot však s nečakanými náklonmi bojuje a vytvára protitlak, úspešne drží rovnováhu a používa svoje nohy a rameno ako zarážku. Akonáhle tlak pominie, dvere znovu otvorí a prejde nimi, pričom ich podrží aj pre druhého robota.
To, čo je na tomto videu reklamné a prikrášlené je to, ako robot bez ramena príde k zavretým dverám, smutne sa na ne pozrie a následne beží pre pomoc k svojej kópii s ramenom, ktorá mu s otvorením pomôže. Ide o demonštráciu budúceho fungovania a kooperácie, ale v prípade videa bol takmer určite celý proces riadený joystickom a človek robota s ramenom navigoval zrejme až ku kľučke, pričom až tam prevzal riadenia automatický otvárací algoritmus a mechanizmus.
Optické rozpoznávanie prekážok a autonómna navigácia
Tieto „životné prejavy“ firma často sama podporuje a napríklad na už spomenutej TED prednáške z minulého roku môžeme vidieť to, ako sa riaditeľ Boston Dynamics k Spotovi Mini prihovára podobne ako ku psovi, pričom človek za joystickom automaticky zdvihne zadok robota a klesne s jeho predkom, simulujúc tak hravý postoj našich štvornohých priateľov.
V závere sa dokonca robota opýta či je unavený, na čo robot „odpadne“ a vystrčí brucho, ako keby chcel na ňom poškriabať. Publikum to pravdaže baví a vyvolá to v nich emocionálnu reakciu. Nie je na tom nich nič zlé. Koniec koncov, ľudia často vdychujú neexistujúce osobnosti a túžby do neživých objektov, ako napríklad námorníci do svojej lode, pričom môžu použiť výrazy typu, že „loď je nahnevaná“ alebo že „protestuje“, pričom každý vie, že ide len o neškodnú antropomorfizáciu.
V prípade robotov to láka ešte viac. Môžete na túto hru pokojne pristúpiť a pobaviť sa, podobne ako sa bavíme na vytvorenej osobnosti nejakej zábavnej animovanej postavičky od štúdia Pixar. Je len nutné byť si vedomý toho, že ide o kompletnú prefabrikáciu. Robot nemá žiadne, a to ani rudimentárne osobnostné vlastnosti psa, podobne ako postavička od Pixaru nie je naozajstnou osobou s danou povahou. Vidíme skrátka prejav človeka, ktorý postavičku animuje a robota riadi.
Aktuálny Atlas beží cez lúku
Treba ale pripomenúť to, že nejde o to, že by sme túto imitáciu nedokázali základne dnes vytvoriť. Roboti Boston Dynamics potenciálne môžu byť vybavení systémom umelej inteligencie v podobe odpovedacieho stroja, ako je napríklad Amazon Echo, Google Home či Microsoft Cortana, ktorý namiesto prirodzenej vetnej skladby, žartovania či inej sociálnej interakcie bude mať vložené základné reakcie psa. Boston Dynamics ale tieto systémy zavedené nemá (vzhľadom na stav vývoja na to pravdaže ani nie je dôvod) a všetka sociálna interakcia je vytváraná človekom za joystickom.
AUTONÓMNA ROBOTIKA V SPOJENÍ S NEZNÁMYM PROSTREDÍM
Ako si ale súčasná autonómna robotika počína v praxi v relatívne neznámych situáciách? Demonštrácia konkrétnych vecí na pódiách a starostlivo pripravených úlohách, alebo ukážka toho najlepšieho na propagačných videách je jedna vec, ale kontakt s reálnym svetom druhá. A nič nie je lepšou ukážkou ozajstných schopností, ako súťaž, kde sa rôzne špičkové robotické tímy postavia proti sebe.
Doposiaľ najlepšou ukážkou aktuálneho stavu autonómnej robotiky bola súťaž Robotics Challenge, ktorú usporiadala agentúra DARPA v rokoch 2013 až 2015. Ideou bolo postaviť proti sebe niekoľko rôznych robotov a použiť ich na simulovaný servisný zásah. Cieľom bolo zistiť, ako sú roboti potenciálne úspešní pre použitie na komplexné úlohy v nebezpečnom prostredí a či sú schopní úspešne používať nástroje a mechanizmy, vytvorené pôvodne pre ľudí. V roku 2013 sa uskutočnili najprv testy mnohých tímov v simulovanom digitálnom prostredí a tie najúspešnejšie, v podobe 24 tímov zo 6 rôznych krajín, sa zúčastnili fyzického finále uskutočneného v lete 2015 v Kalifornii. Šlo o dvanásť tímov z USA, tri z EU (dva nemecké a jeden taliansky), päť z Japonska, tri z Južnej Kórey a jeden z Číny (Hongkongu).
Dráha súťaže DARPA Robotics Challenge
Úlohou robotov bolo nasadnúť na relatívne regulárne terénne auto (Polaris Ranger XP 900), posadiť sa na miesto vodiča, zošliapnuť pedál plynu a riadiť. Mali prejsť zhruba sto metrov, pričom inak priama cesta obsahovala uprostred jednu zatáčku v tvare písmena S. Roboti mali na konci cesty z auta vystúpiť a prísť k dverám budovy, otvoriť ich klasickou kľučkou a vojsť dnu. Vnútri ich čakalo ďalších 5 úloh.
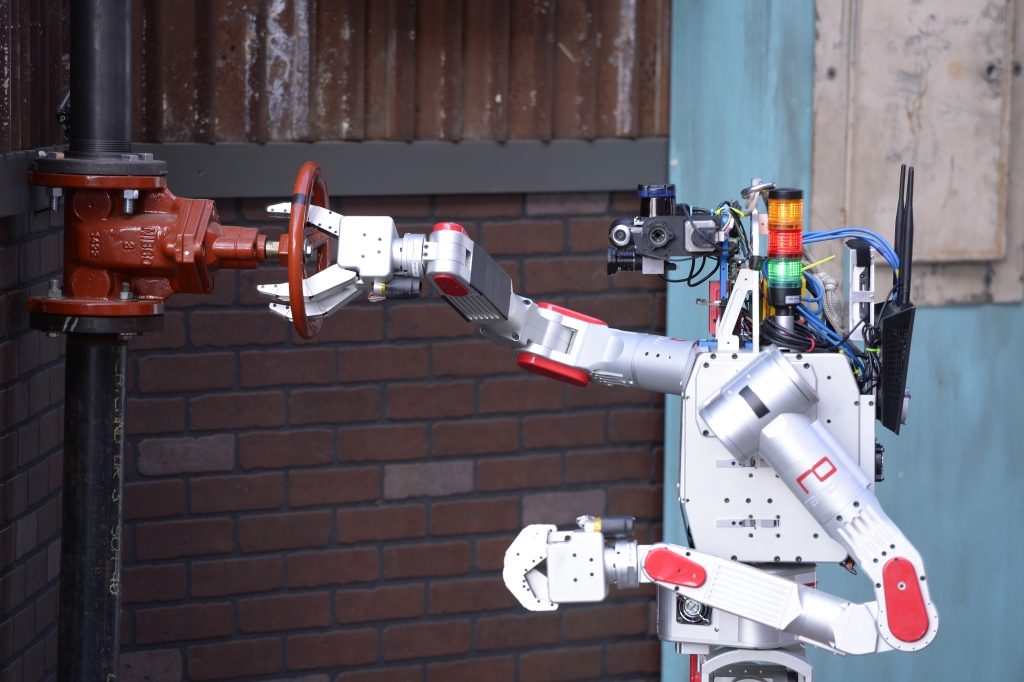
Prvou bolo to, že robot mal otočiť 26 cm kruhový ventil na ovládanie potrubia o 360°, pričom to mohol urobiť tak ako človek otáčaním za okraje (ako volant), alebo chytením za stredovú os. Simulovala sa tak reálna činnosť, ktorú by bolo treba vykonať napríklad v nejakej fabrike pri núdzovom odstavení nejakého systému.
Ďalšou úlohou bolo vyvŕtať kruhový 20 cm otvor v sadrokartónovej stene, pričom v okolí boli dva klasické elektrické nástroje na batériu, v podobe vŕtačky a špirálovej pílky, umiestnené na poličkách. Robot teda musel preferovaný nástroj zobrať do ruky a zapnúť ho tým istým štýlom ako človek. Po vyvŕtaní otvoru na konkrétnom mieste sa mal robot presunúť do druhej polovice testovacej budovy, pričom mal prejsť cez trosky z tehiel a kovového šrotu na podlahe (2 × 4 m) a vystúpiť po malom schodisku na plošinu.
Robot Hubo riadi auto
Tímy vedeli, aké typy úloh bude musieť ich robot vykonať, avšak skutočnú podobu celého prostredia sa dozvedeli až po príchode. DARPA vytvorila štyri identické súťažné dráhy, pričom ich podobu môžete vidieť na fotografiách. Celá súťaž bola prístupná verejnosti, pričom behom dvoch súťažných dní robotov videlo 12 000 divákov. Úlohou tímu bolo robota navigovať a splniť všetky úlohy, pričom navigátor bol umiestnený mimo dohľadu a situáciu vyhodnocoval len na základe dát z robota. Nikto z tímu mu zároveň nesmel posielať žiadne iné informácie.
Šlo o tzv. autonómiu pod dohľadom. V základe sa dá povedať, že čím menej dát si robot so svojím dohľadom vymieňa, tým je autonómnejší. Roboti nesmeli mať žiadne pomocné káble a ani iné mechanizmy a ich tím s nimi musel komunikoval na diaľku pomocou rádiového spojenia, ktoré poskytla DARPA. Kým vonku bolo spojenie rýchle a dobré, v testovacej budove (respektíve jej atrape) bol signál umelo spomalený a s občasným prerušením (na 1 až 30 sekúnd), čo simulovalo zhoršený príjem. V základe si môžeme komunikáciu navigátora predstaviť ako „choď doľava“, či „tu je ventil, otoč ho“, avšak nie už tak, že by niekto robota ovládal kompletne ako bábku. Ak robot spadol, alebo sa niekde zasekol (napr. v aute) a nemohol pokračovať, tím mal povolené robota vrátiť späť na nohy alebo do uspokojivej pozície, pričom bol penalizovaný 10-minútovým čakaním.
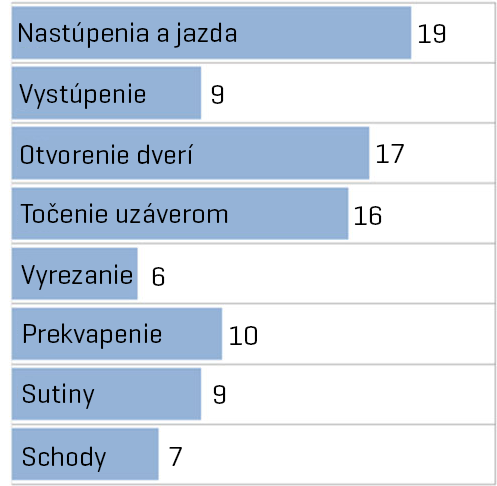
Každý tím mal na splnenie úloh hodinu a jeden pokus za deň. Súčasťou bol takisto element prekvapenia, ktorý plnila úloha, ktorá nebola vopred oznámená. Pri prvom súťažnom dni šlo v budove o zatlačenie páky, pri druhom dni zas o magnetickú zástrčku, ktorú bolo treba vybrať zo zásuvky a zasunúť do inej. Dohromady tak šlo o osem úloh, pričom za každú sa udeľoval jeden bod. Tím s najväčším počtom bodov vyhral, pričom sa počítal ten lepší dosiahnutý výsledok z dvoch dní. Ak mali tímy rovnaký počet bodov, rozhodoval lepší čas dokončenia úloh (ktorý však nemohol prekročiť 60 minút).
Všetkých osem úloh sa podarilo načas splniť trom tímom. Prvú cenu v podobe odmeny 2 miliónov dolárov si odniesol juhokórejský KAIST (prechod za 44 minút a 28 sekúnd), druhú v podobe 1 milióna dolárov americký IHMC Robotics (50:26) a polmiliónovú tretiu odmenu si odniesol takisto americký tím Tartan Rescue (55:12). Štyrom ďalším tímom sa podarilo splniť sedem úloh, pričom šlo o nemecký NimbRo Rescue (34:00) a americké tímy RoboSimian (47:59), MIT (50:26) a WPI-CMU (56:06).
Zaujímavosťou je, ktoré činnosti sa ukázali ako najťažšie, čo je vidieť v tabuľke, kde sú zoradené v poradí, v akom nasledovali. Prechod sutinami a schodmi má nižšie splnenie hlavne preto, že bol až na konci a nie všetky tímy sa k nemu dostali. Za najťažšie je možné považovať skôr vystúpenie z auta a prechod k budove (len 9 úspešných tímov) a takisto vyrezanie otvoru do steny pomocou nástroja, čo splnilo len 6 robotov. Ako je vidieť, mnoho tímov sa tieto úlohy rozhodlo preskočiť, alebo pri nich zlyhali, pretože pri nasledujúcich úlohách bola úspešnosť značne vyššia.
To, že tri tímy vyšli zo súťaže s plným počtom bodov možno chápať ako veľký úspech. Len na porovnanie, prvú súťaž pre samoriadiace autá v roku 2004 (DARPA Grand Challenge), ktorá sa uskutočnila v púšti, nedokončil ani jeden tím, zatiaľ čo o rok neskôr došlo do cieľa už 22 tímov z 23. V roku 2007 tímy plnili úspešne testy už v simulovanom mestskom prostredí, pričom víťazi súťaže sa napokon stali jadrom vývojového tímu samoriadiaceho auta Googlu.
Motiváciou na usporiadanie DARPA Robotics Chalenge bola podľa oficiálnych vyjadrení agentúry DARPA havária nukleárnej elektrárne v japonskom meste Fukušima, v roku 2011. Táto nehoda poukázala na to, že mať mechanizmy, ktoré by v zamorenom či inak postihnutom území mohli zasahovať a prebrať tak úlohy ľudského personálu, by bolo nesmierne cenné. To je samozrejme pravda, avšak po zložení ružových okuliarov treba povedať, že reálnym dôvodom bolo bezpochyby to, že DARPA potrebovala získať aktuálny pohľad o stave robotiky a jej možnostiach z hľadiska manipulácie a vykonávania činností, v súvislosti s potenciálnou armádnou činnosťou.
Prvá verzia robota Atlas súťaží v prechode sutinami pod vedením IHMC Robotics
Boston Dynamics sa súťaže nezúčastnil, avšak DARPA šiestim tímom poskytla ich robota Atlas (v starej prvej verzii z roku 2013). Šlo o šesticu tímov bez vlastného stroja, konkrétne tímy Hongkongskej univerzity, univerzity MIT, IHMC Robotics, TRACLabs, Trooper ViGIR, a WPI-CMU. Tie teda súťažili len so svojím softvérom. Tretí menovaný tím (IHMC Robotics) s ním skončil v súťaži na druhom mieste. Od tejto prvej varianty Atlasu je druhá a hlavne súčasná tretia verzia značne pokročilejšia, najmä z hľadiska masívnej stability.
To, že si dnešní roboti Boston Dynamics poradia v prostredí, ktoré „hrá proti nim“, či už ide o zatvárajúce sa dvere alebo sácanie a tlačenie ich tela externými silami do rôznych smerov, je obrovským pokrokom. Pri robotike od iných vývojových tímov a vlastne aj na celej súťaži DARPA Robotics Challenge často vidíme, ako sú pohyby robotov pomalé a nesmelé a často dopadnú dobre len v ideálnych podmienkach, čo je s odvážnou, stabilnou a rýchlou chôdzou dnešných robotov z Boston Dynamics v ostrom kontraste. Aj keď teda pod pokrievku týchto technológií kvôli nepublikovaniu vedeckých prác nemôžeme nahliadnuť, predvádzané výsledky hovoria sami za seba.
POTENCIÁL AUTONÓMNEJ ROBOTIKY V NADCHÁDZAJÚCICH ROKOCH
Robotika bude v nasledujúcich rokoch našu spoločnosť meniť čoraz viac, pričom prvou vlnou sú bezpochyby idey tzv. štvrtej industriálnej revolúcie, v podobe automatických robotických fabrík, za ktorou nasleduje prerod dopravy smerom k samoriadiacim vozidlám a napokon androidom, ktorí budú chodiť medzi nami.
Kým v prípade robotických fabrík zmenu vidíme už dnes a jej skutočnú silu pocítime v nadchádzajúcich desiatich rokoch, samoriadiace vozidlá sú z hľadiska veľkého rozšírenia v premávke vzdialené zrejme niekoľko dekád. Plnohodnotných androidov, ako ich poznáme z vedecko-fantastických filmov, zrejme nemožno očakávať skôr ako na konci storočia. To pravdaže neznamená, že dovtedy sa neobjavia prvé úspešné pokusy. Samoriadiace taxíky sa vo veľkomestách môžu objaviť už budúcu dekádu a podobná situácia môže nastať aj v pokročilej autonómnej robotike s dvoma alebo štyrmi nohami, ktorá bude môcť byť použitá v rôznych špecifických situáciách.
Hubo otáča ventil v rámci súťaže DARPA Robotics Challenge
Autonómna robotika z hľadiska pohybu a manipulácie urobila za posledných 10 rokov obrovský skok dopredu, avšak je to len jedna časť celej skladačky a nemožno očakávať, že budeme mať skutočného androida za pár rokov doma. Robot však môže mať mnoho podôb a dnes nič nebráni v rozširovaní napríklad robotických sprievodcov na letiskách, či strojov na spríjemnenie domova.
Tie už vidíme prezentované na mnohých výstavách, či už ide napríklad o roztomilého maličkého domáceho robota Kuri, ktorého minulý rok predstavila firma Mayfield Robotics, či Airport Guide Robot, ktorého predviedla spoločnosť LG a nájdeme ho „pracovať“ na letisku v Juhokórejskom Soule. Robot vám odpovie na otázky o vašom lete, nasmeruje vás k odletovej bráne či poskytne informácie o počasí v cieľovej destinácii. V základe takýchto robotov môžeme vnímať ako pojazdnú (na kolieskach) variantu Amazon Echo či Google Home, s ktorými sa môžete rozprávať a odpovedia vám na základné otázky. Fyzickú činnosť od nich však očakávať nemožno.
Od ozajstnej „hard-core“ android robotiky sme ešte ďaleko, avšak súčasné úspechy nás napĺňajú optimizmom a pomáhajú nám zahnať rozčarovanie z konca minulého storočia. Pokročilá robotika pôjde v budúcnosti ruka v ruke s pokrokom vo vývoji umelej inteligencie a je výborné, že motoricky sa už dnes čoraz viac približuje k cieľu. Budúcnosť robotiky bude takisto ovplyvnená vývojom nových materiálov a výrobných schém.
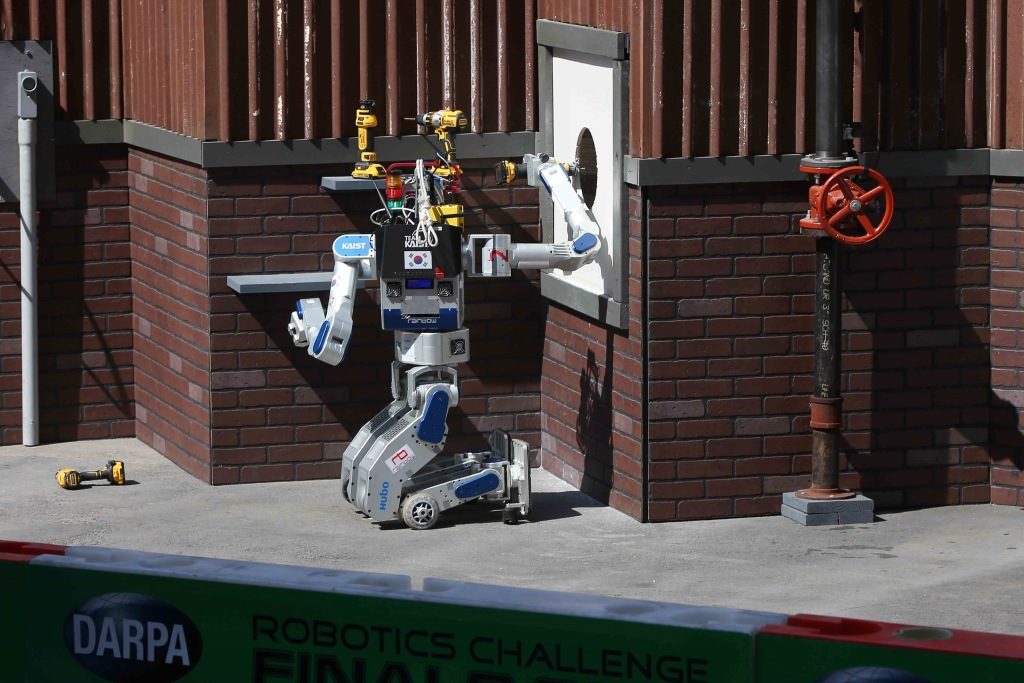
Juhokórejský robot Hubo vyrezáva dieru do steny pomocou elektrickej pílky držanej v ruke
V robotike sa dlhodobo používajú klasické prevody, motory a rôzne elektromechanické pohony, avšak vývojové laboratóriá sa čoraz viac venujú celkom novým metódam, pričom ide hlave o umelé svalstvo a rôzne poddajné a jemné materiály pre tzv. mäkkú robotiku (soft robotics). Tá viac napodobuje biologické stroje, ktoré vytvorila príroda, pričom potenciálne by sme takisto mohli vytvoriť stroje, ktoré by boli schopné opraviť samých seba v prípade poškodenia. Najväčšie problémy v tomto smere v súčasnosti ležia na prístupe k vhodným energetickým úložiskám, respektíve napájacím schémam a potenciálne aj metódam na zber energie.
Veľmi dôležitý je takisto výskum materiálov vhodných súčasne pre pohyb a tiež hmatový vnem, čo je tradičný problém pri bežných mechatronických systémoch. Koniec koncov, v prírode telá vyšších živočíchov obsahujú mnoho druhov materiálov, od pevných kostí až po jemnejšie svalstvo či kožu, čo sa od kovových tiel súčasných robotov značne líši. Prepojenie všetkých biologických materiálov je navyše extrémne detailné a tesné, na rozdiel od značne separátnych materiálov kovov či plastov dnešných robotov. V poslednej dobe sa však objavujú napríklad zaujímavé pokusy s integráciou rôznych textilných látok, do ktorých je možné integrovať vodivé časti. Pokrok je v mnohých smeroch každopádne veľmi nádejný a s nadšením ho budeme naďalej sledovať.